Products
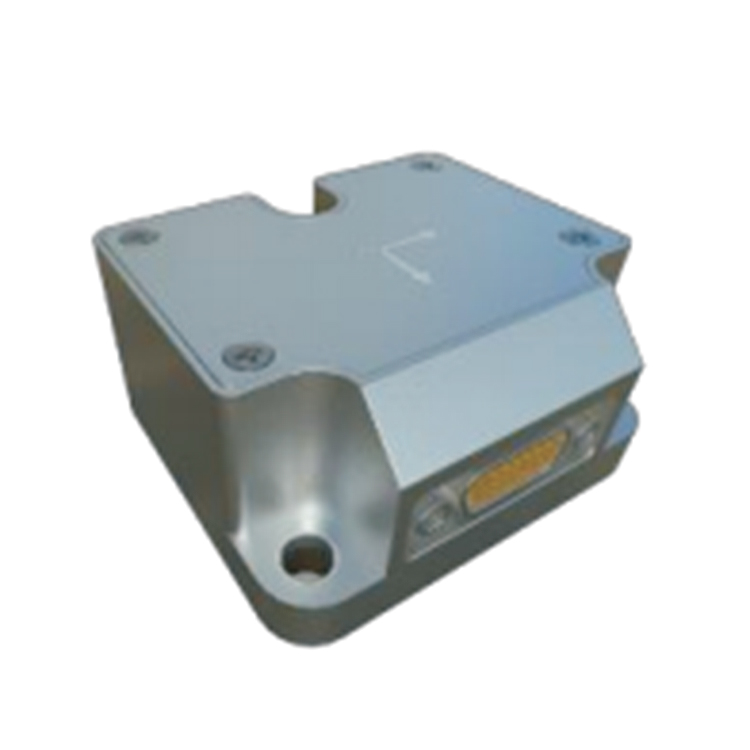
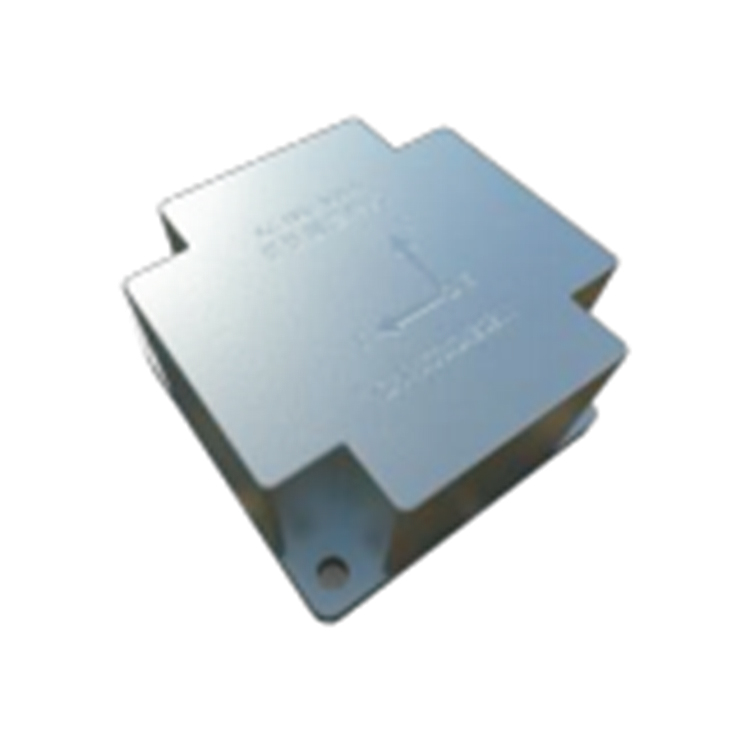
JD-M303A MEMS matatu-axis gyroscope
Product features
Sarudzo yekushandisa:Inogona kuiswa kune servo system, yakasanganiswa navigation, maitiro ekutarisa system uye mamwe minda.
Environmental adaptation:Kudengenyeka kwakasimba uye kuramba kuvhunduka, kunogona kupa ruzivo rwakakwana rwemakona ekumhanya pa -40 °C ~ +85 °C
Kurongeka kwepamusoro:kushandisa high-precision gyroscope. kurongeka kwekutonga kuri nani pane 40urad.
Mafaira ekunyorera:
Aviation:mutsvaki, optoelectronic pod
Nyika:turret, mufananidzo kudzikamisa chikuva
Nyika:mufananidzo kudzikamisa chikuva, servo system

Product performance parameters
| Metric Category | Metric Name | Performance Metric | Mashoko | ||
| Gyroscope parameters | Kuyera chiyero | ±500°/s | |||
| Scale factor repeatability | <50ppm | ||||
| Scale factor linearity | <200ppm | ||||
| Kugadzikana kwakarerekera | <5°/h(1σ) | National mauto mwero 10s yakatsetseka | |||
| Kusagadzikana kwakarerekera | <1°/h(1σ) | Allan Curve | |||
| Biased repeatability | <3°/h(1σ) | ||||
| Angular random walk (ARW) | <0.15°/√h | ||||
| Bandwidth (-3dB) | 200Hz | ||||
| Data latency | <1ms | Kunonoka kwekukurukurirana hakuna kubatanidzwa. | |||
| InterfaceCharacteristics | |||||
| Interface type | RS-422 | Baud rate | 460800bps (customizable) | ||
| Data update rate | 2kHz (customizable) | ||||
| EnvironmentalAdaptability | |||||
| Kushanda tembiricha range | -40°C~+85°C | ||||
| Storage tembiricha range | -55°C~+100°C | ||||
| Vibration (g) | 6.06g (rms), 20Hz~2000Hz | ||||
| ZvemagetsiCharacteristics | |||||
| Input voltage (DC) | +5V | ||||
| ZvenyamaCharacteristics | |||||
| Size | 44.8mm*38.5mm*21.5mm | ||||
| Kurema | 50g | ||||
Product Sumo
Imwe yemabhenefiti makuru eJD-M303A MEMS 3-axis gyroscope ndeye compact size. Kuyera masendimita mashoma mudhayamita, ichi chigadziri chakareruka chinogona kubatanidzwa nyore nyore mumhando dzakasiyana dzekushandisa, zvichiita kuti ive yakanakira mainjiniya nevagadziri mumaindasitiri akasiyana siyana.
Nheyo yeJD-M303A MEMS matatu-axis gyroscope ndeyepamusoro-chaiyo yepamba gyroscope, inogona kuburitsa angular velocity data ine Ultra-yakakwirira chaiyo. Iyi data inozosanganiswa neyepamusoro tembiricha yekubhadhara algorithms uye inertial unit calibration macalculation kuti ive nechokwadi chekubuda kwedata kunogara kwakavimbika uye kwakaringana.
Chimwe chinhu chakakosha cheJD-M303A MEMS matatu-axis gyroscope ndiyo yakaderera simba rekushandisa. Izvi zvinoreva kuti inogona kushandiswa mune zvakasiyana-siyana zvekushandisa pasina kusimbisa simba rekupa, iyo inonyanya kukosha kune bhatiri-inoshanda michina.
- Saizi uye Chimiro Inogona Kugadzirwa
- Indicators Inovhara Yese Range kubva Pazasi kusvika kumusoro
- Zvakanyanya Kuderera Mitengo
- Ipfupi Yekuburitsa Nguva uye Nenguva Yemhinduro
- Chikoro-Enterprise Cooperative Research Gadzira Chimiro
- Own Automatic Patch uye Gungano Mutsetse
- Own Environmental Pressure Laboratory